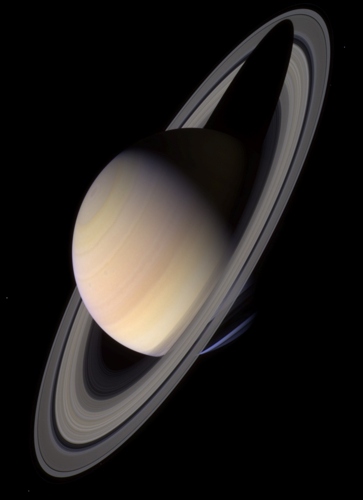
Saturn is the second largest planet in the Solar System and the sixth planet from the Sun. Saturn is notable for it’s spectacular ring system, which is an awe-inspiring sight even through the smallest of telescopes.
Saturn is a gas giant planet, like Jupiter. It is likely to be composed of a core of rock and metal surrounded by metallic hydrogen, then a liquid hydrogen and helium layer and an outer gaseous layer of molecular hydrogen (96.3 %) . There appear to be two cloud layers, with clouds in the outer layer composed of ammonia crystals and clouds in the inner layer composed of ammonium hydrosulfide or water.
Observation
Through a good small telescope, the rings of Saturn make a stunning sight. Some of the largest of Saturn’s moons – Titan, Rhea, Iapetus, Dione and Tethys, for example – can also be observed orbiting the planet.
To find Saturn’s current position in the sky from your location, visit our Night Sky Simulator.
Saturn Stats:
- Type: Gas Giant
- Equatorial Diameter: 120,536 km (9.45 Earths)
- Mass: 5.683×1026 kg (95.16 Earths)
- Distance from Sun: 9.041 AU to 10.124 AU
- Sidereal period (day length): 10 hours 33 min
- Orbital period (year length): 29.457 Earth years
- Number of Moons: 83 (plus many additional moonlets)
- Symbol: ♄ (HTML code: ♄)
Density
Saturn has the lowest overall density of all of the planets in our Solar System. In fact, Saturn’s average density is less than that of water, so a rigid ball of the equivalent size and density to Saturn would, in theory, float in water (if it were possible to building a big enough tank of water, of course!).
Saturn’s Rings
Saturn’s rings are, on average, only around 20 metres thick but have a span of 170,000 miles. They are composed of chunks of ice, varying in size from small grains to large ‘snowballs’ several meters wide. (The rings must also be full of snowman-like shapes, created when two ‘snowballs’ collide). Differences in brightness and density give the rings an appearance resembling the grooves on a vinyl record. There are many gaps dividing the annular disk into smaller rings, the largest portions of which are labelled A to F. The main gaps between the rings are known divisions – most notably the Cassini division between the A and B rings, which is often visible with a good amateur telescope. It is possible that the rings are the remnants of a moon or that they formed from the same material and at the same time as the planet.
Spokes
Images from the Voyager space probes in 1980 showed strange dark lines crossing in a perpendicular direction to the rings, which had been entirely unexpected. When Voyager I passed to the other side of the planet, the features, which were given the name ‘spokes’, appeared to glow brightly, suggesting they were made of tiny dust particles scattering light, possibly held away from the ring by electrostatic repulsion.
Saturn’s Moons
Saturn has at least 83 moons, 53 of which have been officially named (as of 2022), in addition to many large moonlets within the rings. In order of increasing distance from the planet, these are:
- S/2009 S 1
- Pan
- Daphnis
- Atlas
- Prometheus
- Pandora
- Epimetheus
- Janus
- Aegaeon
- Mimas
- Methone
- Anthe
- Pallene
- Enceladus
- Tethys
- Telesto
- Calypso
- Dione
- Helene
- Polydeuces
- Rhea
- Titan
- Hyperion
- Iapetus
- S/2019 S 1
- Kiviuq
- Ijiraq
- Phoebe
- Paaliaq
- Skathi
- S/2004 S 37
- S/2007 S 2
- Albiorix
- Bebhionn
- S/2004 S 29
- Skoll
- S/2004 S 31
- Erriapus
- Tarqeq
- Siarnaq
- Tarvos
- Hyrrokkin
- Greip
- Mundilfari
- S/2004 S 13
- S/2006 S 1
- S/2004 S 3
- Suttungr
- S/2004 S 20
- Jarnsaxa
- Narvi
- Bergelmir
- Hati
- S/2004 S 17
- S/2004 S 12
- S/2004 S 27
- Farbauti
- Thrymr
- Bestla
- S/2004 S 7
- Aegir
- S/2004 S 30
- S/2004 S 22
- S/2004 S 25
- S/2004 S 32
- S/2004 S 23
- S/2006 S 3
- S/2004 S35
- Kari
- S/2004 S 28
- Loge
- S/2004 S 38
- Fenrir
- Ymir
- Surtur
- S/2004 S 33
- S/2004 S 24
- S/2004 S 21
- S/2004 S 39
- S/2004 S 36
- Fornjot
- S/2004 S 34
- S/2004 S 26